商(shāng)用(yòng)車(chē)工程車(chē)3D-360°全景环视系统
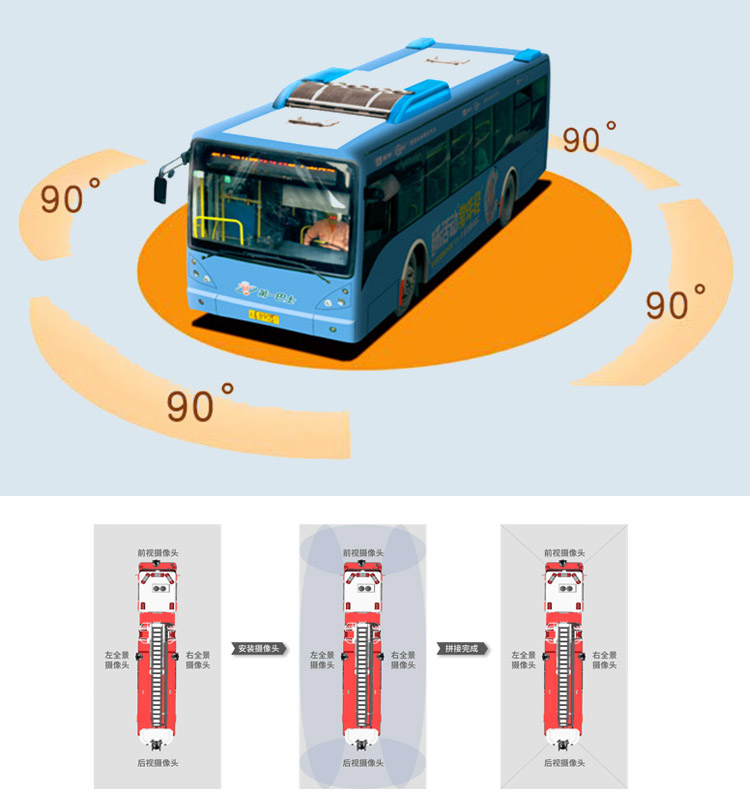
星光宝盒3D-360°全景环视系统通过装在車(chē)前、后、左、右的四个广角摄像头采集到的图像信
息,进行畸变处理(lǐ)和色彩平衡后、形成平面图像,并清晰、流畅地显示在显示屏上。
驾驶员通过鸟瞰图、可(kě)直观地看到車(chē)辆所处的位置以及車(chē)辆周围的障碍物(wù),从容操控車(chē)辆泊車(chē)入位或通过复杂路面,
有(yǒu)效减少刮蹭、碰撞、陷落等事故的发生。

视频 AD 转换:系统最大支持 4 路AHD1080P 摄像头接口,设计上采用(yòng)视频 AD 芯片进行转换。
摄像头输入:设备支持 4 路AHD1080p摄像头输入; 支持摄像头缺失检测。
视频输出:支持 CVBS,HDMI,AHD720P,AHD1080P,VGA 多(duō)种视频输出实现高清图像,显示在中控显示屏上或接在 DVR 录像机上录像。
信号设置:设备需要检测倒档信号、左转向灯、右转向灯、ACC 信号。
产品参数
项目 | 参数配置 |
主机 | 四核高性能(néng)军工级人工智能(néng)处理(lǐ)芯片 |
控制系统 | 核心算法,无盲區(qū),不卡帧,不延时,超大范围无缝拼接,支持四路。超高清 1080P 视频输入。 |
遥控器 | 黑色遥控器//7 号電(diàn)池座/150*40*13mm |
SOC | 性能(néng) CortexA9 1GHz x2+VivanteGC2000 |
RAM | 1600MHz_DDR3_1Gx2 |
ROM | SPI_Nandflash_512MB |
视频输入 | AHD(1920*1080P) |
视频输出格式 | CVBS(PLA/NTSC) AHD(1080p/720P)TVI(1080p/720p) |
HDMI(1080P/720P) VGA |
数据接口 | USB2.0 |
工作電(diàn)压 | 9-36V |
输出電(diàn)压 | 5.5V(提供摄像头供電(diàn)) |
工作電(diàn)流 | 300MA/24V |
工作温度 | ‘-30℃-80℃ |
存储温度 | ‘-40℃-100℃ |
视频文(wén)件 | 视频文(wén)件大小(xiǎo) 分(fēn)段录像(10 分(fēn)钟、30 分(fēn)钟、1 小(xiǎo)时)可(kě)调 |
储存空间 | 支持内置固态硬盘(最大支2T) |
循环覆盖 | 支持循环覆盖(录满自动删除最早录像文(wén)件) |
摄像头参数
图像传感器 | 索尼 IMX307 | 视频制式 | PAL |
感光像素 | 1920(H)*1080(V) | 图像清晰度 | 1920TVL |
帧频 | 25FPS | 视频信号 | AHD |
最低光照度 | 0.01Lux | 信噪比 | ≧60dB |
视场角 | 垂直 140° | 视场角 | 水平 180° |
白平衡 | 自动 | 增益控制 | 自动 |
背光补偿 | 自动 | 额定工作電(diàn)压 | 5V |
额定工作電(diàn)流 | 120mA | 工作温度 | ‘-30℃-80℃ |
防水等级 | IP67(摄像头) | | |







下一个产品
没有(yǒu)了